publications
publications in reversed chronological order.
2023
- inertia estimation
- impact perching
 A soft-bodied aerial robot for collision resilience and contact-reactive perchingSoft Robotics, 2023
A soft-bodied aerial robot for collision resilience and contact-reactive perchingSoft Robotics, 2023 - wholebody perching
 Design, characterization and control of a whole-body grasping and perching (whopper) droneIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Design, characterization and control of a whole-body grasping and perching (whopper) droneIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 - tactile mapping
 Tactile-based Exploration, Mapping and Navigation with Collision-Resilient Aerial VehiclesarXiv preprint arXiv:2305.17217, 2023
Tactile-based Exploration, Mapping and Navigation with Collision-Resilient Aerial VehiclesarXiv preprint arXiv:2305.17217, 2023
2022
- learning w/ rollout
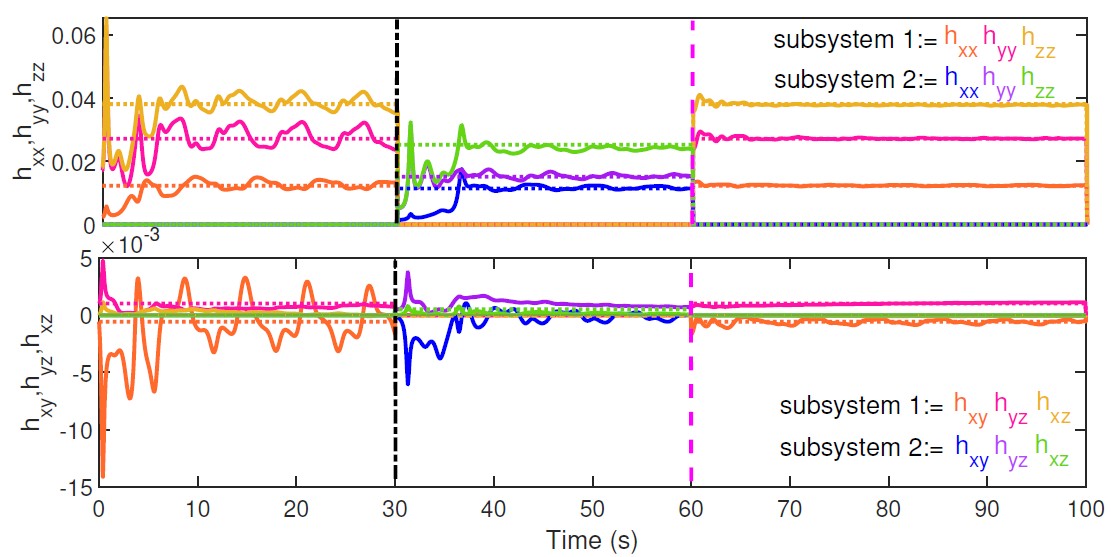
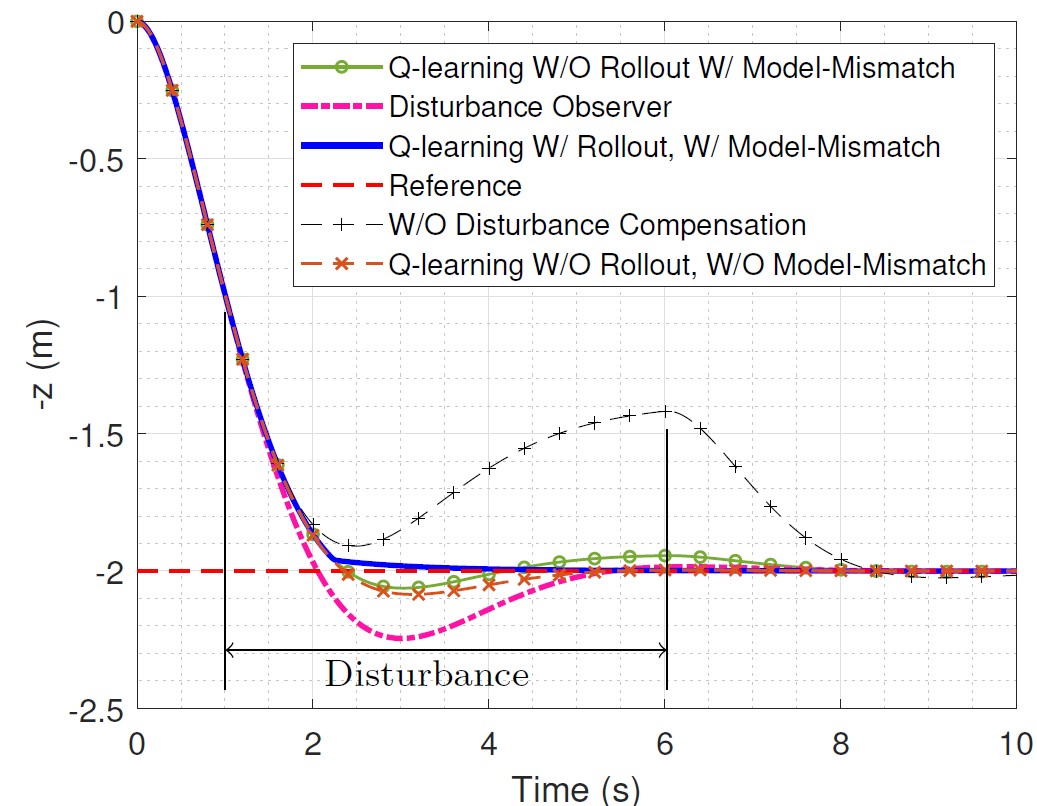 Learning-based Control for Passive Flexible Multirotors (PFMs) with Physical Interaction AbilitiesIFAC-PapersOnLine, 2022
Learning-based Control for Passive Flexible Multirotors (PFMs) with Physical Interaction AbilitiesIFAC-PapersOnLine, 2022
2021
- collision recovery
 Collision recovery control of a foldable quadrotorIn 2021 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2021
Collision recovery control of a foldable quadrotorIn 2021 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2021 - survey
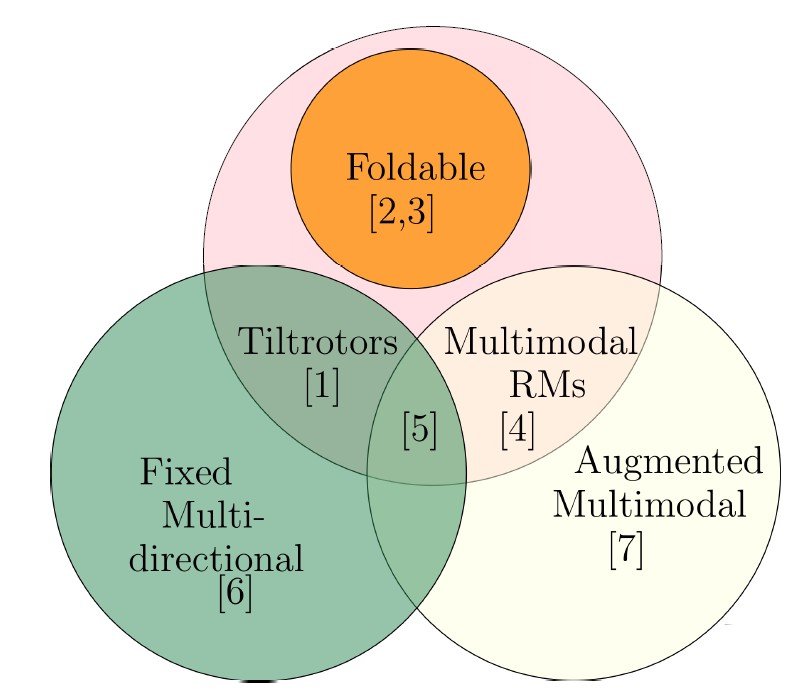 Towards reconfigurable and flexible multirotors: A literature survey and discussion on potential challengesInternational Journal of Intelligent Robotics and Applications, 2021
Towards reconfigurable and flexible multirotors: A literature survey and discussion on potential challengesInternational Journal of Intelligent Robotics and Applications, 2021
2020
- squeeze-to-fly
 Design and Control of SQUEEZE: A Spring-augmented QUadrotor for intEractions with the Environment to squeeZE-and-flyIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
Design and Control of SQUEEZE: A Spring-augmented QUadrotor for intEractions with the Environment to squeeZE-and-flyIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020 - thrust vectoring
 Ground trajectory control of an unmanned aerial-ground vehicle using thrust vectoring for precise graspingIn 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2020
Ground trajectory control of an unmanned aerial-ground vehicle using thrust vectoring for precise graspingIn 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2020
2019
- oilspill tracking
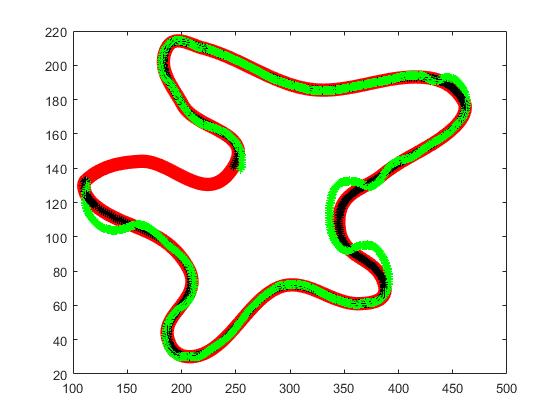 Boundary tracking using sampling based model predictive control lawIn AIAA Scitech 2019 Forum, 2019
Boundary tracking using sampling based model predictive control lawIn AIAA Scitech 2019 Forum, 2019